


平成25年度 第3回組込みシステム研究会実施報告
日 時 平成25年12月14日(土) 9:00~12:30
開催場所 本校A棟3階 31教室
参 加 者 神奈川県内の高等学校の先生方
講 師 鈴木美朗志(モバイル・ロボット科講師)
助 手 五十嵐元樹(マイコン・ロボット科2年生)
内 容 PIC12F683を使ったステッピングモータの正転・逆転回路
概要:
ステッピングモータは、パルス発振機からのパルス信号に同期して回転する同期モータで、パルスモータともいわれており、起動・停止・位置決めに優れた制御性をもっています。
特徴としては、
1)ステップ角が一定なので、回転角度は入力パルス数に比例する。
2)1ステップあたりの角度誤差は±5%程度で、この誤差は連続回転させても累積されない。
3)起動・停止応答性に優れているので、瞬時に正逆転ができる。
4)減速機を使用することなく、パルス間隔を広くすることにより、低速運転ができる。
5)励磁コイルが励磁されていると大きな保磁力をもち、回転子に永久磁石を使っているステッピングモータでは、無励磁状態でも保磁力をもつ。このために停止位置がずれない。
6)フィードバック機構を必要としない、いわゆるオープンループが制御できる。
今回のプログラムは、C言語コンパイラには、マイクロチップ社のフリーのC言語コンパイラXC8を使い、PICKitという書き込み器でマイコン(PIC12F683)に書き込み、動作確認をし、作品をお持ち帰りいただきました。
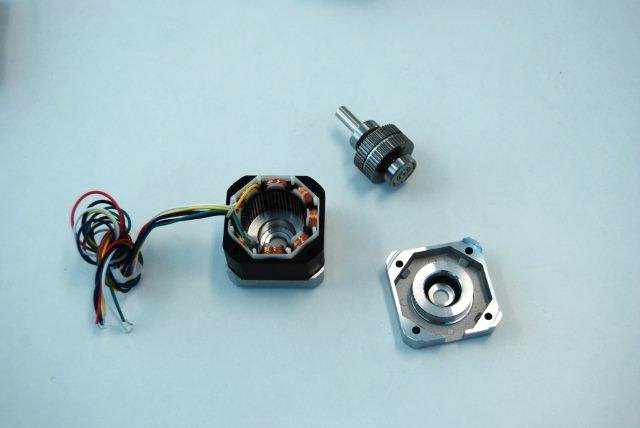
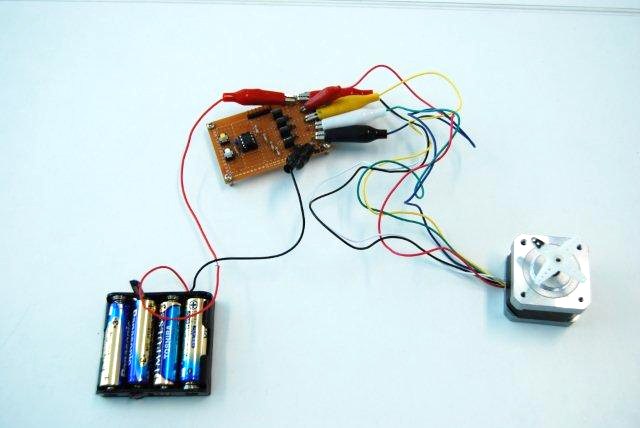
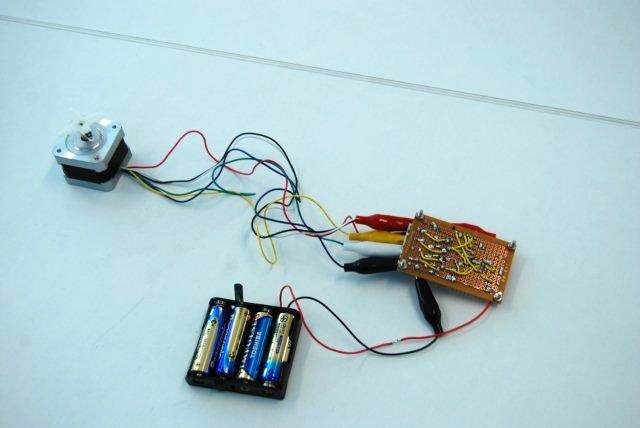
作品:
ステッピングモータの中身
作品表面 作品裏面
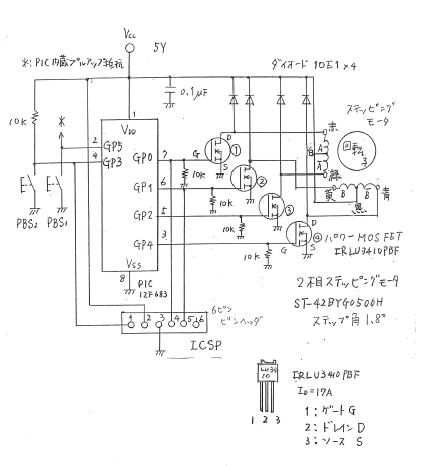
資料:回路図
制作実習の様子 :


毎度、ご好評をいただき、大変感謝しております。
次回も是非ご参加ください。

コメント